
【导读】马斯克的终极设想,正在成形。今天,特斯拉放出了「世界模拟器」震撼演示。一个神经网络,每天狂吞500年人类驾驶经验,并在无限的虚拟世界中自我进化。同款AI大脑,擎天柱也可共用。
一个神经网络模型,统治了一切。
今天,特斯拉官宣神经网络「世界模型器」,AI可以直接模拟、合成自动驾驶的「孪生世界」。
如下九宫格演示中,特斯拉「世界模拟器」生成了汽车行驶过程中的不同视角。

同时,一些长尾场景,诸如行人横穿马路、车辆加塞,AI都可以直接「脑补」生成。
从相同的初始视频出发,让模拟中的汽车以对抗性方式形式
以往遇到的挑战场景,「世界模拟器」能够在虚拟世界中不断试炼。
从相同的初始视频片段(绿色小方块)开始,模拟会根据新的动作集发散到不同状态
这种数据的合成,还可以通过像玩游戏一样,在模拟的世界中驾驶。
如下所示,神经网络成功合成8个摄像头、24帧/秒的连续画面,一次直出长达6分钟的逼真驾驶体验,细节还原度惊人。
一直以来,马斯克宣称,特斯拉所打造「世界模型」是一套共用的AI大脑,并为其配上不同的「身体」——自动驾驶汽车、机器人。
没错,这个「世界模拟器」所有合成的环境,同样可以模拟多种真实场景,训练擎天柱。


擎天柱正在特斯拉的神经网络虚拟世界中穿行

擎天柱的各种不同动作,都能精准地反映在虚拟世界的模拟当中
这种无限的绝佳试炼场,正是特斯拉让FSD和擎天柱,不断精进的秘密武器。


那么,特斯拉「世界模拟器」是如何学习、训练,并用于测试的呢?
近来,在ICCV 2025主题演讲中,特斯拉AI团队的负责人Ashok Elluswamy揭开了内幕。
一个神经网络大脑,两个身体
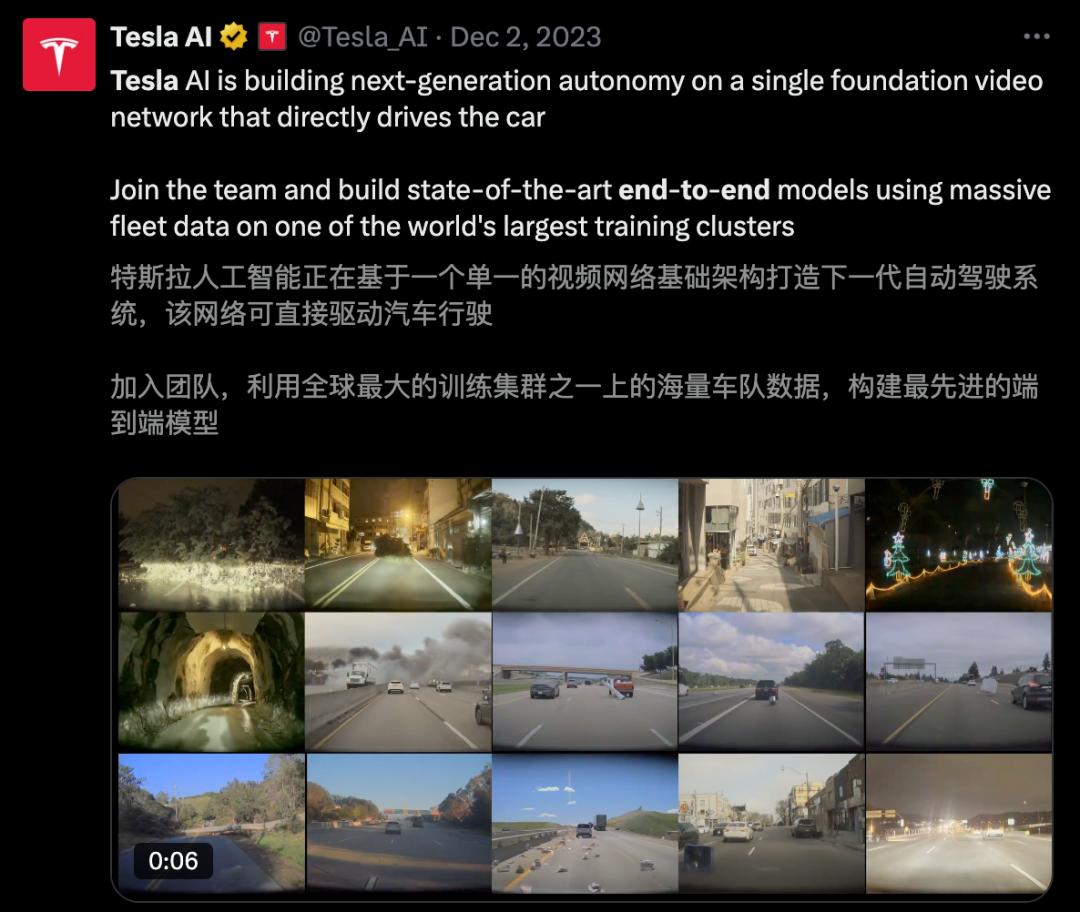
众所周知,特斯拉利用一个「端到端」的神经网络来实现自动驾驶。
这个端到端网络处理来自多个摄像头、车辆速度等运动学信号、音频、地图及导航信息,最终生成控制车辆行驶的指令。
选择「端到端」这条技术路线,意味着什么?
要理解特斯拉在做什么,我们首先得知道,自动驾驶领域存在着两条截然不同的技术路线。
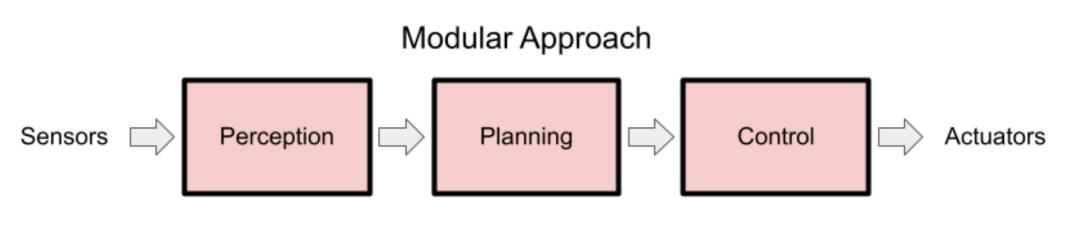
第一条路,也是绝大多数公司选择的路,可以称之为「模块化」的方法。这种方法将驾驶任务拆解成几个独立的步骤:
感知(Perception):利用激光雷达、高清摄像头等传感器,识别出道路上的所有物体——这是车,那是人,这是一条车道线。
预测(Prediction):利用感知数据,预测这些物体的下一步动向——那辆车可能会变道,那个行人可能会过马路。
规划(Planning):根据预测结果,规划出自己车辆的最佳行驶路径——应该减速,还是应该绕行。
这种方式的好处显而易见:分工明确,每个模块都可以独立开发和调试,在项目初期更容易上手。
第二条路,也是特斯拉所选择的:是「端到端」(End-to-End)神经网络。
在特斯拉的系统中,不存在独立的感知、预测和规划模块,只有一个庞大而统一的神经网络。
这个网络的「输入端」,是车辆摄像头捕捉到的原始像素画面、车辆自身的速度、音频、地图导航信息等一切原始数据;
这也是特斯拉一直以来,所推崇的「纯视觉」方案。
而它的「输出端」,则直接是两个指令:转动方向盘的角度,和踩下油门/刹车的力度。
在特斯拉看来,与依赖激光雷达等昂贵传感器的「模块化」(感知、预测、规划分立)方案相比,端到端方案拥有根本性优势:
1. 学习人类价值观
复杂的现实路况充满了「迷你电车难题」,这些权衡难以用代码规则穷举,但可以从海量的人类驾驶数据中隐式学习。
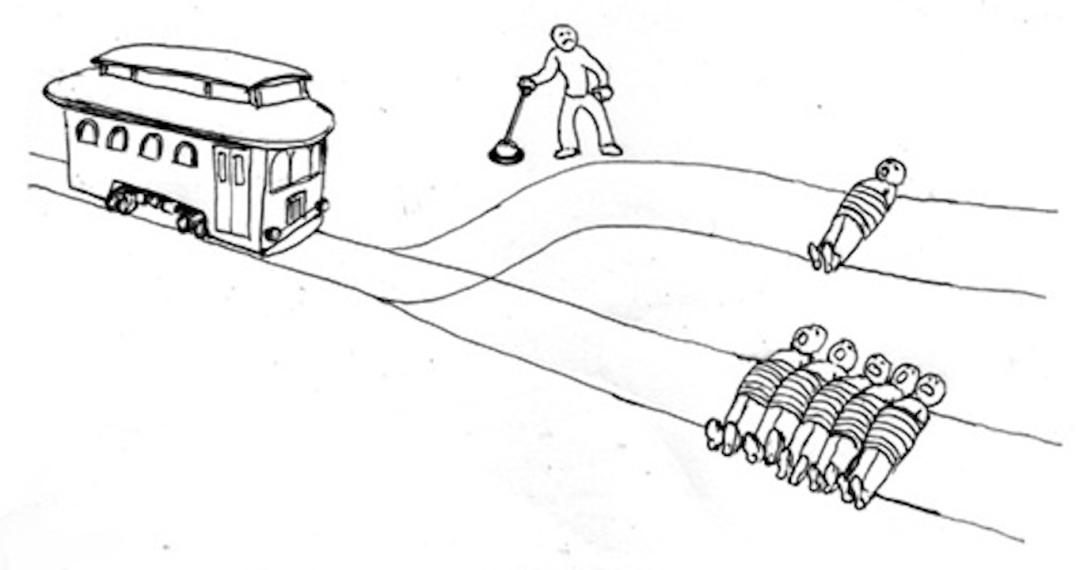
举个栗子,在下面的场景中,AI需要决定是直接碾过前方一大片水洼,还是借道对向车道。
通常来说,突然驶入另一侧车道会存在一定的危险。
传统的「模块化」系统会在这里陷入逻辑冲突。
它的程序里可能有两条写死的规则:「规则A:绝对不能驶入对向车道」和「规则B:避免驶过障碍物(如此大的水坑)」。
当两条规则冲突时,系统该如何抉择?
但眼下能见度足够高,在可预见的未来未来不会有对向车辆驶来;其次,水坑比较大,最好是避开。
而这种权衡,很难用传统编程逻辑描述出来,但人看一眼就知道该怎么做了。

这只是经典「迷你电车难题」其中一个案例,现实中,自动驾驶汽车还会遇到各种罕见的问题。
AI不是在执行规则,而是在学习一种更接近人类价值观的判断方式。
2. 消除模块间的信息损失
在传统方案中,感知、预测和规划模块之间的接口难以明确界定。
而在端到端系统中,梯度能够从最终的控制指令一直反向传播至传感器输入,从而对整个网络进行整体性优化。
如下两段路况:一个是鸡群要过马路,另一个是鹅群在路中间溜达。
若在「感知」和「规划」这两个模块之间,建立一套明确的判断规则(本体论ontology)非常困难。
对于模块化系统,「感知」模块可能会给「规划」模块传递这样的信息:「识别到一群鸟类」。
但这种信息是冰冷的。
这群鸟的「意图」——一种微妙、难以量化的信息——在模块之间的传递过程中很容易丢失。
「规划」模块无法知道,它应该为这群鸡减速让行,还是可以安全地绕过这群鹅。

一群鸡正在路边,看起来有要过马路的意图;FSD停车等待

一群鹅在路边,但它们只是想待在原地;FSD直接绕行
在「端到端」的网络里,不存在这种信息传递的壁垒。
整个网络作为一个整体,直接从像素中理解了「鸡要过马路」和「鹅想待着」这两种不同的「软意图」(soft intent),并直接输出减速或绕行的驾驶行为。
从输入到输出,信息是完整流动的,不存在中间环节的损耗。
正是基于这些原因,特斯拉选择了「端到端」这条路。当然,也伴随着巨大的挑战。
3. 可扩展性与简洁性
它能更好地处理现实世界中无穷无尽的「长尾问题」,并且计算架构统一,延迟确定。
4. Scaling Law的延续
总体而言,这更符合「苦涩的教训」(The Bitter Lesson)所揭示的规律——即强大的通用方法和海量算力,最终将超越复杂的人工设计。
正是因为上面这些原因,以及其更多其他的考量,特斯拉才选择了「端到端」架构来做自动驾驶。
不过话说回来,要打造这样的系统,还得克服不少难题。
20亿token输入,跳出「维度诅咒」
在真实世界中,一个安全的自动驾驶系统,需要处理高帧率、高分辨率、长时间序列的输入信息。
特斯拉算了一笔账:
- 7个摄像头×36帧/秒×500万像素×30秒历史数据
- 未来几英里的导航地图和路线
- 100 Hz车辆动态数据,如速度、惯性测量单元(IMU)、里程计等
- 48 KHz音频数据
如果将这些输入token拆分成最小的「信息单元」,比如每个图像块是5x5像素,token总数将高达20亿个。
神经网络的任务,就是在这20亿个输入信息单元中,找到正确的因果关系,并最终将其压缩成2个token——方向盘和加减速。
这是一个极其棘手的问题,AI很容易在如此海量的数据中,学到错误的、偶然的「相关性」,而非真正的「因果性」。
特斯拉的解法简单粗暴:用巨大的数据量来解决问题。
他们坐拥一个数据宝库,其车队每天能产生相当于人类500年驾驶时长的海量数据。
负责人Ashok Elluswamy将其称之为,「Niagara Falls of data」。当然,并非所有数据都有用。
因此,特斯拉建立了一套复杂的「数据引擎」流水线,从海量视频中自动筛选出最有趣、最罕见、最高质量的学习样本。
当AI学习了足够多这样的「疑难杂症」数据后,它就能展现出惊人的泛化能力。
比如在一个雨天路滑的场景中,AI在前方车辆还未明显失控时,就提前开始减速。
它理解到:下雨、前车可能打滑、撞上护栏后可能反弹回车道……这种对「二阶效应」的预判,只有在见过足够多复杂情况后才能学会。
FSD思维过程揭开,全凭摄像头
「端到端」系统最大的诟病在于——「黑箱」特性。
如果车辆做出了一个奇怪的举动,工程师如何知道是哪里出了问题?
Ashok认为,这个「黑箱」其实可以被打开。
特斯拉神经网络在输出最终驾驶指令的同时,也能输出可供人类理解的「中间token」(Intermediate Tokens)。
这些token可以被看作是AI的「思考过程」,也是人们常说的CoT。
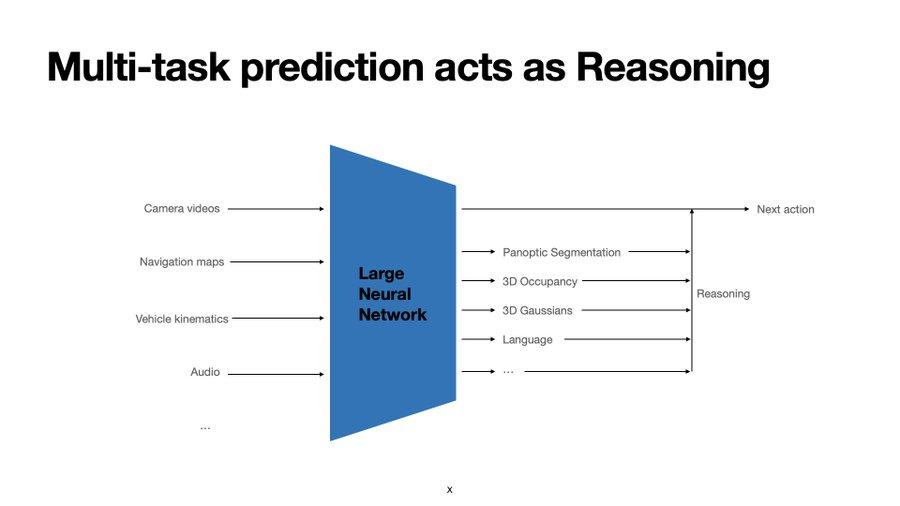
完整架构与可解释性输出
其中一项最直观的技术,叫做「生成式高斯泼溅」(Generative Gaussian Splatting)。
车辆在行驶过程中,轨迹通常是线性的,导致视角变化不足,用传统方法重建3D模型质量不高。
尤其是,在新视角下更容易失真。
此外,3D高斯泼溅还需要以来,其他pipeline良好的初始化,整体优化时间可能长达数分钟。
另一方面,它还具备了出色的泛化能力。
无需初始化,全程运行时间仅约220毫秒,能够对动态物体进行建模,还能和端到端大模型联合训练。
最厉害的是,所有这些高斯点,都基于车上配置的摄像头生成。
特斯拉神经网络生成的高斯泼溅渲染的新视角
此外,AI还能用自然语言解释它的决策。这套系统已经在FSD v14.x版本中部分运行。

自然语言推理
世界模拟器,AI无限试错
最后一个,也是最难的挑战是——评估。
一个训好的自动驾驶系统,若在真实道路上测试,既危险又缓慢。
即使AI在历史数据上表现完美,也不意味着它能在真实世界中应对自如。
为此,特斯拉亮出了终极武器:一个完全由神经网络构成的「世界模拟器」。
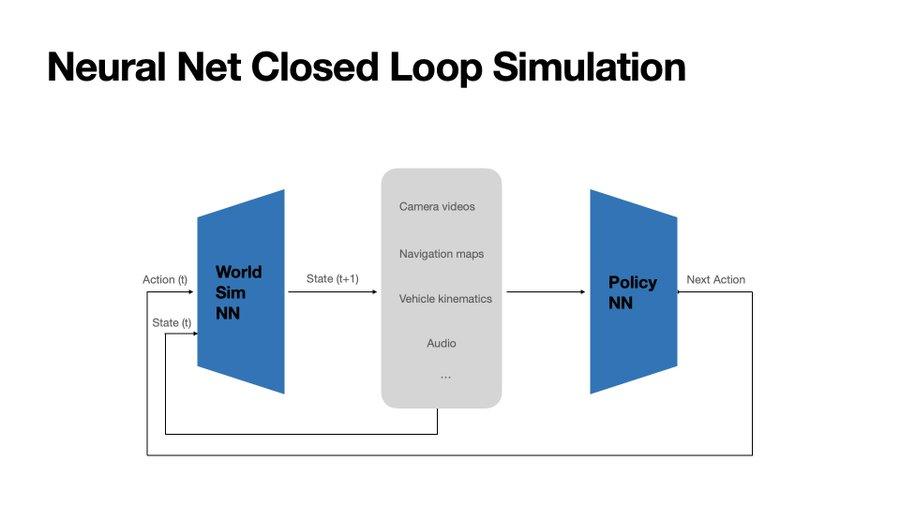
这个模拟器和驾驶AI一样,也是用海量真实世界数据训练出来的。
但它的功能不同:它不是根据当前状态预测「下一步该怎么开」,而是根据「当前状态」和「一个驾驶动作」,来生成「下一秒世界会变成什么样」。
这个模拟器能以极高的保真度,实时生成车辆所有摄像头应该看到的画面。它就像一个由AI创造的、无限逼真的驾驶视频游戏。
如前所述,这个「世界模拟器」的威力在于:
闭环评估:可以将新的驾驶AI模型放入这个模拟世界中,让它自由驾驶,评估其长期表现。
情景再现与修改:可以截取一段真实发生的危险场景,让AI在这个模拟世界里用不同的方式重新应对一次,看看结果是否会更好。
创造对抗性场景:可以人为地在模拟世界中创造出极端、罕见的危险情况,比如让一辆车突然做出不合常理的举动),专门测试AI的应对极限。
真正的终局:人形机器人
讲到这里,你会发现,特斯拉的野心早已超越了「造车」。
汽车,只是他们收集数据的触手,和这套AI系统的第一个应用载体。他们真正打造的,是一套可以解决通用物理世界交互问题的底层AI引擎。

最好的证据是,这套系统已经无缝迁移到了他们的另一个人形机器人项目——擎天柱(Optimus)上。
为FSD打造的「世界模拟器」,同样可以为擎天柱生成在工厂里漫步的场景,测试和训练它在物理世界中的导航与交互能力。
而这,才是特斯拉自动驾驶故事背后,那个更宏大、也更激动人心的未来。
扩展阅读:CVPR史上首次!中国车厂主讲AI大模型,自动驾驶也玩Scaling Law?
参考资料:
https://x.com/aelluswamy/status/1981644831790379245
https://www.youtube.com/watch?v=wHK8GMc9O5A
https://x.com/Tesla/status/1982255564974641628


