
1.电子学院王兴军教授团队在集成光子机器视觉与感知领域取得重要成果;
2.芯闻 | 东南大学许国强团队实现线性莫尔热输运局域效应;
3.清华大学-上汽通用五菱汽车人工智能联合研究中心揭牌
1.电子学院王兴军教授团队在集成光子机器视觉与感知领域取得重要成果
12月23日,北京大学王兴军教授-舒浩文研究员团队、香港城市大学王骋教授团队及上海交通大学周林杰教授团队在Nature Communications期刊在线发表题为 “Integrated bionic LiDAR for adaptive 4D machine vision”的研究论文。研究团队提出并验证了一种受人眼视觉机制启发的集成仿生FMCW激光雷达新架构,首次在芯片尺度上实现具备“凝视”能力的自适应并行4D成像系统,并进一步通过与相机协同感知实现4D-plus机器视觉表达,为“高分辨率、低功耗、高灵活性”的下一代智能感知提供了新的路径。
文章截图
“智能体感知”新需求
面向自动驾驶、具身智能与低空智能系统等新兴场景,机器视觉正从“能看见”走向“看得清、看得快、看得全”。一方面,复杂动态环境要求传感系统在大视场范围内保持持续态势感知;另一方面,决策安全性又依赖对关键目标与关键区域提供更高分辨率、更低时延以及更丰富的多维信息支撑。这使得下一代机器视觉在总体上呈现出对高分辨率、低功耗、可扩展并行化的同时需求。
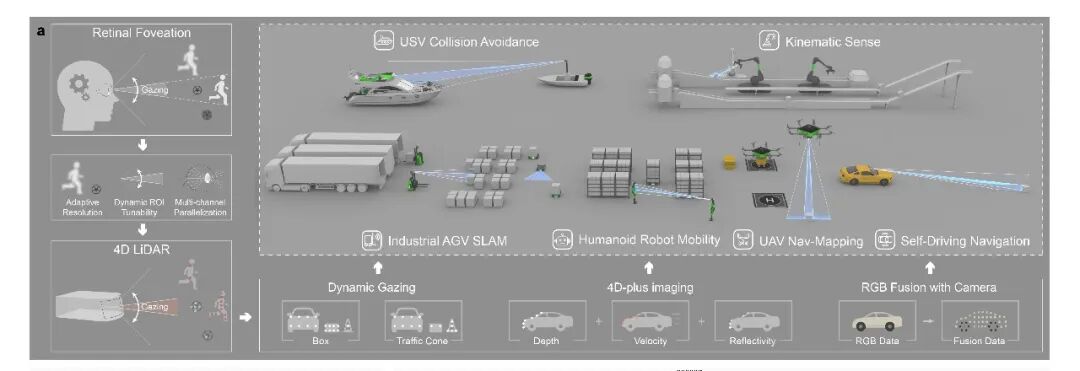
人眼仿生与智能感知应用场景示意图
在这一趋势下,激光雷达作为主动式光学传感器,其性能上限与系统代价的矛盾日益突出。激光雷达的工作本质可以视作对连续物理世界的数字采样,采样点密度以及可获取的信息维度(如距离、速度、反射率等)决定了感知精度与信息表达能力。然而,传统架构提升分辨率往往依赖全视场“堆更多通道、堆更高采样点频”的粗放式扩展,导致光电器件数量、后端高速电子学的带宽与采样处理需求同步攀升,从而在成本、功耗与复杂度上快速逼近工程边界。本质上,这是一条依赖空间维度高密度通道堆叠来提升角分辨率的扩展路径,其边际效益逐步递减而代价持续提升。
对于FMCW激光雷达而言,上述矛盾更为突出。FMCW具备高精度测距、强抗干扰能力,并可同步获取距离与速度等多维信息,但相干链路对光源线宽、调频线性度与相位稳定性提出更严格要求,使单通道链路复杂度与实现成本显著高于非相干方案。也正因如此,行业中常见的“通过空间维度高密度堆叠通道来提升角分辨率”的扩展路径在FMCW体系下更难直接复制,其边际代价更早显现,系统在器件规模、封装堆叠与热管理等方面的工程负担也更难持续承受。相比之下,人眼之所以能够在有限能耗下实现高视敏度,关键在于其并不追求全视场均匀的最高分辨率,而是通过“外围视野 + 凝视焦点”的机制,将高采样密度按需集中到最重要的区域,以更高的资源利用效率获得更优的感知收益。因此,如何在有限通道预算下构建类似人眼“凝视”的自适应资源分配机制,在提升采样效率的同时获得更高有效分辨率,构成了可扩展高分辨率相干感知的关键科学问题。
从堆叠到“凝视”
为此,研究团队提出“微并行”新架构,并在此基础上研制并验证了具备动态凝视能力的并行FMCW激光雷达原型系统,验证了高分辨率成像不必再单纯依赖空间维度的高密度通道堆叠,而可以通过波长/频域的可重构资源调度实现更高效的分辨率扩展。实验结果表明,系统在局部感兴趣区域内实现0.012°的角分辨率,并在同一系统中兼顾大视场覆盖与高精细成像需求。更为关键的是,薄膜铌酸锂电光频梳与可宽谱调谐外腔激光器的结合,使系统在架构层面实现了“视场覆盖能力”与“局部分辨率需求”的解耦:外腔激光器提供大范围视点移动以保证全局覆盖,电光频梳则在目标区域按需提升采样密度,从而实现“看得广”与“看得清”的协同优化。
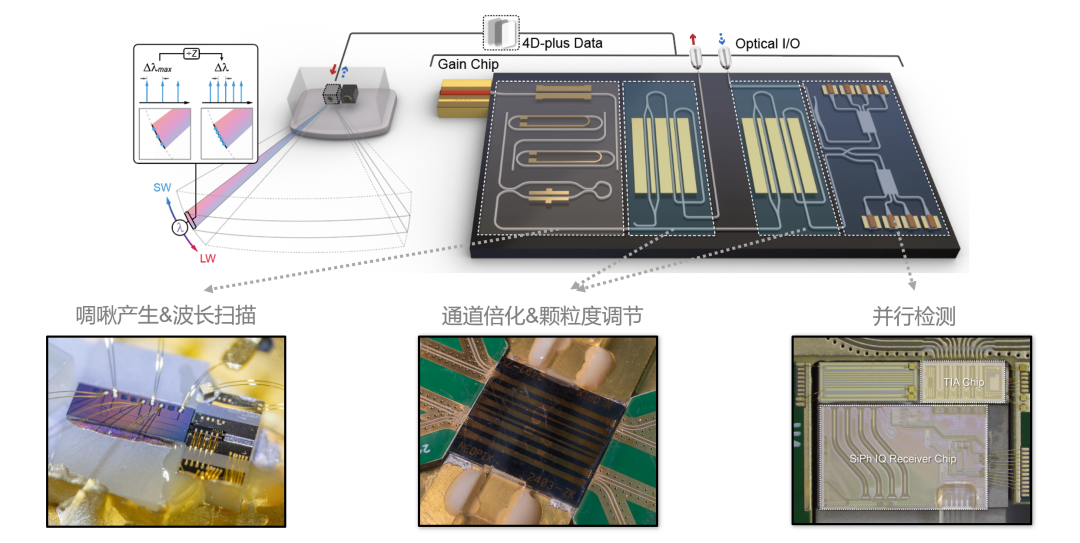
“微并行”FMCW激光雷达系统架构
在此基础上,研究团队进一步演示了首个基于集成光梳的实时并行4D成像系统。在获取三维几何信息的同时,系统可同步解析目标速度与反射率信息,并与可见光相机开展多模态融合,实现点云上色,从而补足激光雷达难以直接获取的颜色外观信息,提升场景可解释性与语义表达能力,形成面向智能体任务的4D-plus场景表征。上述验证表明,该架构通过“凝视”资源分配提升有效采样效率,并将芯片级可重构并行通道作为核心能力支撑,为相干激光雷达走向可扩展、小型化、低功耗的集成化系统方案提供了系统级路径。
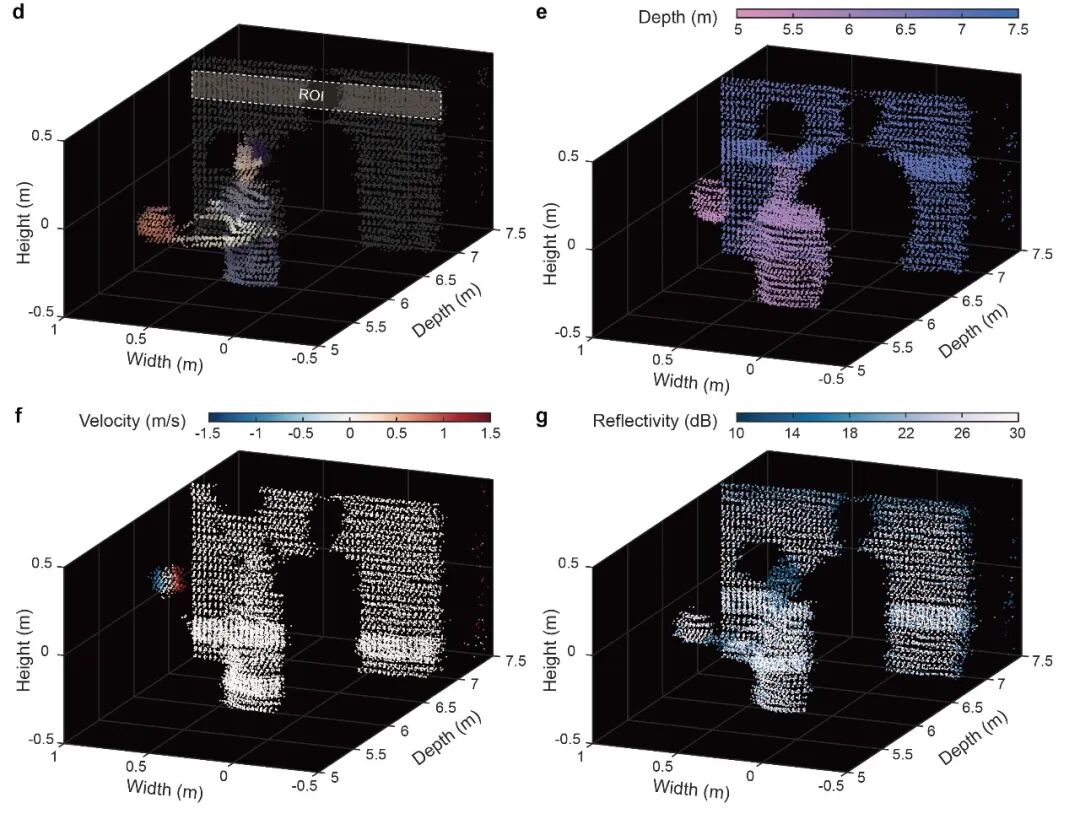
4D-plus实时成像结果
迈向可重构的智能化芯片级仿生感知
该工作展示的“微并行”相干激光雷达架构为构建集成化、可部署的高分辨率探测模块提供了新的思路:它将高分辨率能力从对空间通道密度堆叠的刚性依赖中解放出来,使硬件在有限通道预算下仍可通过可重构资源调度实现“按需增清”,更符合智能体对体积、功耗与可扩展性的综合约束。同时,这类模块具备可重构、可组合特性,未来通过多模块协同与多模态融合,有望催生出更多仿生机器视觉的形态。本研究展示的集成仿生激光雷达架构具有良好的可扩展性和芯片级集成潜力,为下一代智驾、机器人、无人系统以及空天地一体化感知提供了重要的技术支撑。
本论文的共同第一作者为北京大学电子学院特聘副研究员陈睿轩、北京大学电子学院博士生吴一晨、香港城市大学张珂博士、上海交通大学刘楚欣博士和北京大学电子学院博士生黎文灿。北京大学电子学院王兴军教授、香港城市大学王骋教授、上海交通大学周林杰教授以及北京大学电子学院舒浩文研究员为本文共同通讯作者。香港城市大学博士生陈逸堃、北京大学电子学院博士后沈碧涛、香港城市大学陈朝夕博士、香港城市大学研究助理教授冯寒珂、北京大学长三角光电研究院葛张峰副研究员、北京大学长三角光电研究院周䶮副研究员、北京大学电子学院博士后陶子涵、北京大学电子学院博士后张绪光、上海交通大学许维翰博士、北京大学电子学院博士生王艺蒙以及来自SiFotonics Technologies Co., Ltd.的蔡鹏飞博士、潘栋博士为本文作出了重要贡献。南京理工大学何伟基教授也为本工作提供了宝贵建议。该研究得到了科技部重点研发项目、青年科学基金项目(B类)、青年科学基金项目(C类)、中国博士后创新人才支持计划、香港研究资助局项目以及香港裘槎基金的支持。该研究由北京大学电子学院光子传输与通信全国重点实验室作为第一完成单位完成。(来源:PKU电子学人)
2.芯闻 | 东南大学许国强团队实现线性莫尔热输运局域效应
近期,东南大学电子科学与工程学院许国强教授团队在热输运与拓扑物理交叉领域取得重要进展,研究成果以 “Localized dissipation in linear moiré heat transport” 为题发表在《Nature Communications》。该工作首次在无非线性耦合、无动量空间的线性热传导系统中实现莫尔局域效应,为热扩散过程的时空调控提供了新理论框架和实验路线,同时也为揭示基于拓扑输运与莫尔物理的电子器件热管理新机制提供重要参考。
莫尔物理与平带局域机制是近年来拓扑调控与凝聚态交叉领域的热点。其核心是在两层周期结构之间施加一定的旋转角,从而形成更大尺度的莫尔超晶格,并进一步实现电子能带、光学模式等物理过程的可控局域化。
然而,热传导系统因其无动量且无相干性的扩散本质,长期被认为难以实现莫尔效应。通过构建二维双层导热结构并引入空间调制的热导率分布,许国强教授团队突破了上述物理瓶颈,并发现热量传输过程中,在热传导的耗散参数空间中即使了类似能带调控的平带结构与群速度抑制机制。进一步,通过结合热传导过程中的无量纲分析,团队进一步揭示了莫尔调控中的双波矢调控机制,并实现了围绕旋转中心不对称的等效热导率各向异性程度。该研究首次证明线性莫尔结构同样能够构建空间选择性、频率依赖性的热输运模式,这为下一代电子器件热管理、热超材料设计以及非平衡能量调控开辟了全新应用方向。图1展示了双层热传到系统叠加后的莫尔界面结构。
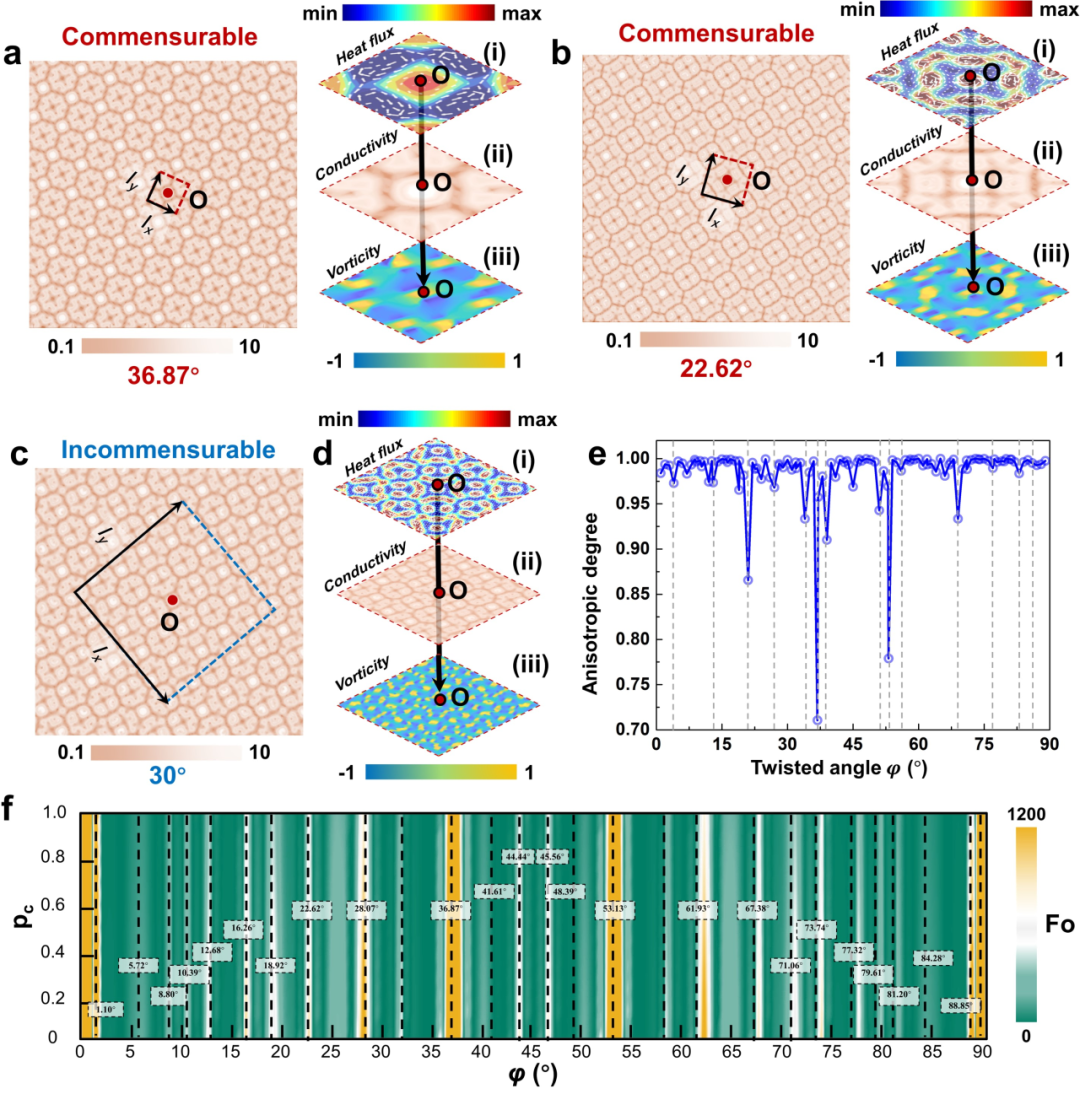
图1. a ~ d 分别展示了在36.87°、22.62°以及30°的等效热导率空间分布;e. 双波矢调控诱导的非对称各向异性程度;f. 不同转角与相对热导率下的傅里叶数分布。
本文基于莫尔热输运理论模型和空间导热结构设计,在界面处直接观测到规律性热场周期纹理(可控扩散模式)、准晶化无序构型下的强局域化热点、角度依赖的热扩散/局域转变。上述发现不仅揭示出莫尔几何驱动热输运的新机制,也证明了热扩散系统同样能够呈现类似固体物理的平带调控学行为。
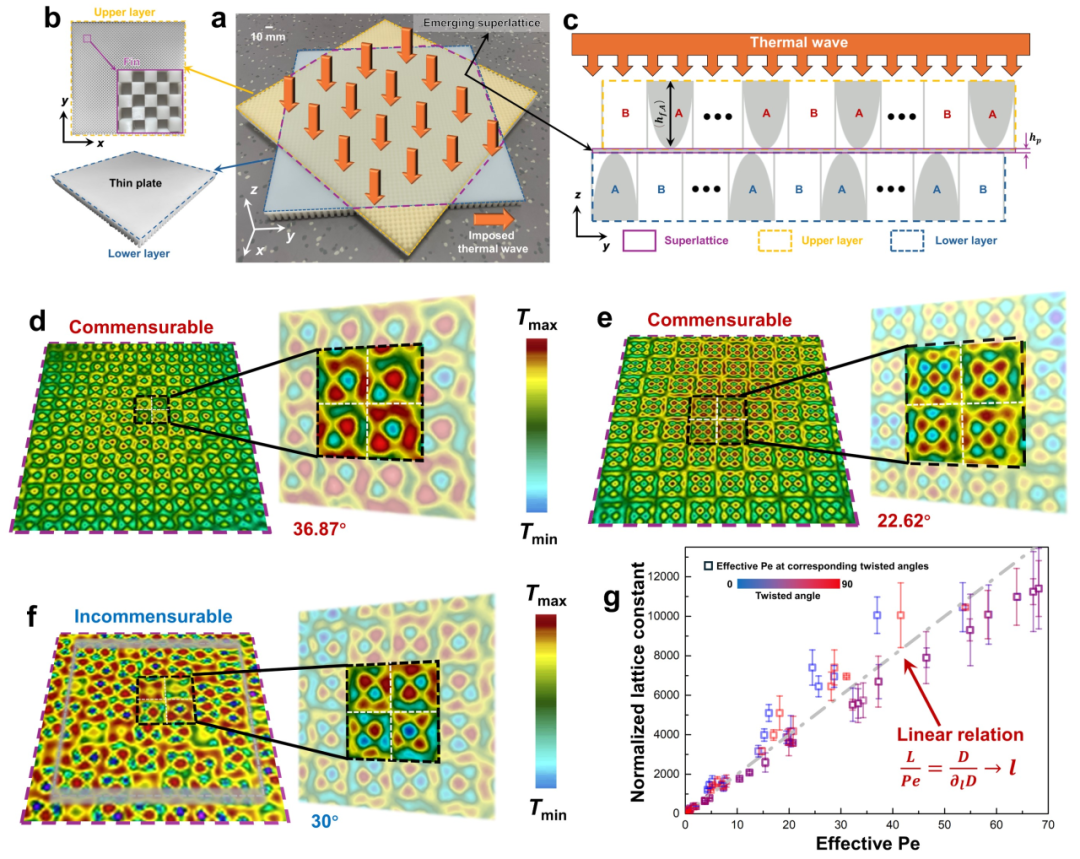
图2. a ~ c 展示了用于实现线性莫尔热传输的实现方案与实验设计;d ~ f 展示了转角为36.87°、22.62°以及30°的界面温度场分布;g. 归一化莫尔晶格常数与等效佩克莱数的线性关系。
本研究在无动量、无非线性耦合的线性导热体系中实现了莫尔热局域效应,提出了一种通过几何叠层与旋转角度构建可编程热传输模式的新机制,不仅突破了传统热扩散理论框架,也为热物理与拓扑物理交叉研究打开了全新方向。基于此,这一发现有望在高密度芯片散热与区域控温、结构化导热与能量路由、热超材料与热逻辑器件设计等领域发挥重要作用,也可能推动拓扑热输运与声子工程等研究迈向更深层次的功能实现,并可向流体扩散、声学传输、生物与化学质量迁移等多学科系统延展,为新一代热管理技术和能量调控平台提供新的底层思路与应用前景。
东南大学电子科学与工程学院为本论文的第一单位和通讯单位。论文第一作者为许国强教授、杨水华博士和周雪教授;通讯作者包括许国强教授(东南大学)、周雪教授(南京信息工程大学)以及Cheng-Wei Qiu教授(新加坡国立大学)。该研究工作得到了东南大学电子科学与工程学院、东南大学优势理科学科交叉平台以及东南大学大数据中心等平台的支持。(来源:东大电子)
3.清华大学-上汽通用五菱汽车人工智能联合研究中心揭牌
2月24日电 12月23日,清华大学-上汽通用五菱汽车人工智能联合研究中心(以下简称“联合研究中心”)揭牌仪式在清华大学举行。清华大学副校长吴华强、上汽通用五菱汽车股份有限公司总经理吕俊成出席仪式并致辞。清华大学车辆与运载学院院长王建强主持仪式。
吴华强表示,发展智能新能源汽车是培育新质生产力、推动新型工业化的重要方向。清华大学在车辆工程领域底蕴深厚,欧阳明高院士、李克强院士团队为国家新能源汽车与智能网联汽车技术的自主创新作出了引领性贡献。本次校企共建联合研究中心,旨在推进有组织科研与产业实践的紧密结合。希望中心立足国家战略需求,开展高水平合作,推动智能绿色出行技术惠及大众,以创新成果支撑汽车强国建设。
吕俊成表示,上汽通用五菱与清华大学此前在动力电池、整车关键系统总成等领域开展了深度合作,为联合研究中心的建设奠定了坚实基础。希望联合研究中心能够建设成为国内汽车人工智能技术的策源地,构建国际领先的开发能力与人才培养体系,助力前瞻智能产品的研发与产业化落地。

揭牌仪式
吴华强、吕俊成共同为联合研究中心揭牌。联合研究中心管委会主任、车辆与运载学院李克强院士,欧阳明高院士,王建强,车辆与运载学院党委书记李升波;上汽通用五菱汽车股份有限公司副总经理、党委副书记韩德鸿,总技术官、技术中心总经理刘昌业,规划与运营管理部总经理肖潇,技术中心副总经理李天辉共同见证。
揭牌仪式后,联合研究中心召开了第一次管委会会议,就中心建设目标、研究方向、运行机制等议题进行深入讨论。
联合研究中心依托清华大学车辆与运载学院建设,旨在充分发挥清华大学在前沿技术探索、基础理论研究与高端人才培养方面的优势,结合上汽通用五菱在工程化落地、市场洞察与规模化制造方面的深厚产业经验,共同开展汽车人工智能领域的关键技术攻关与创新成果转化。(来源:清华大学)


