凤凰网科技讯 9月19日,高德地图近日宣布升级其交通视觉语言模型TrafficVLM,该模型通过融合实时交通孪生技术与多模态大模型能力,可实现车道级交通态势感知与预测。
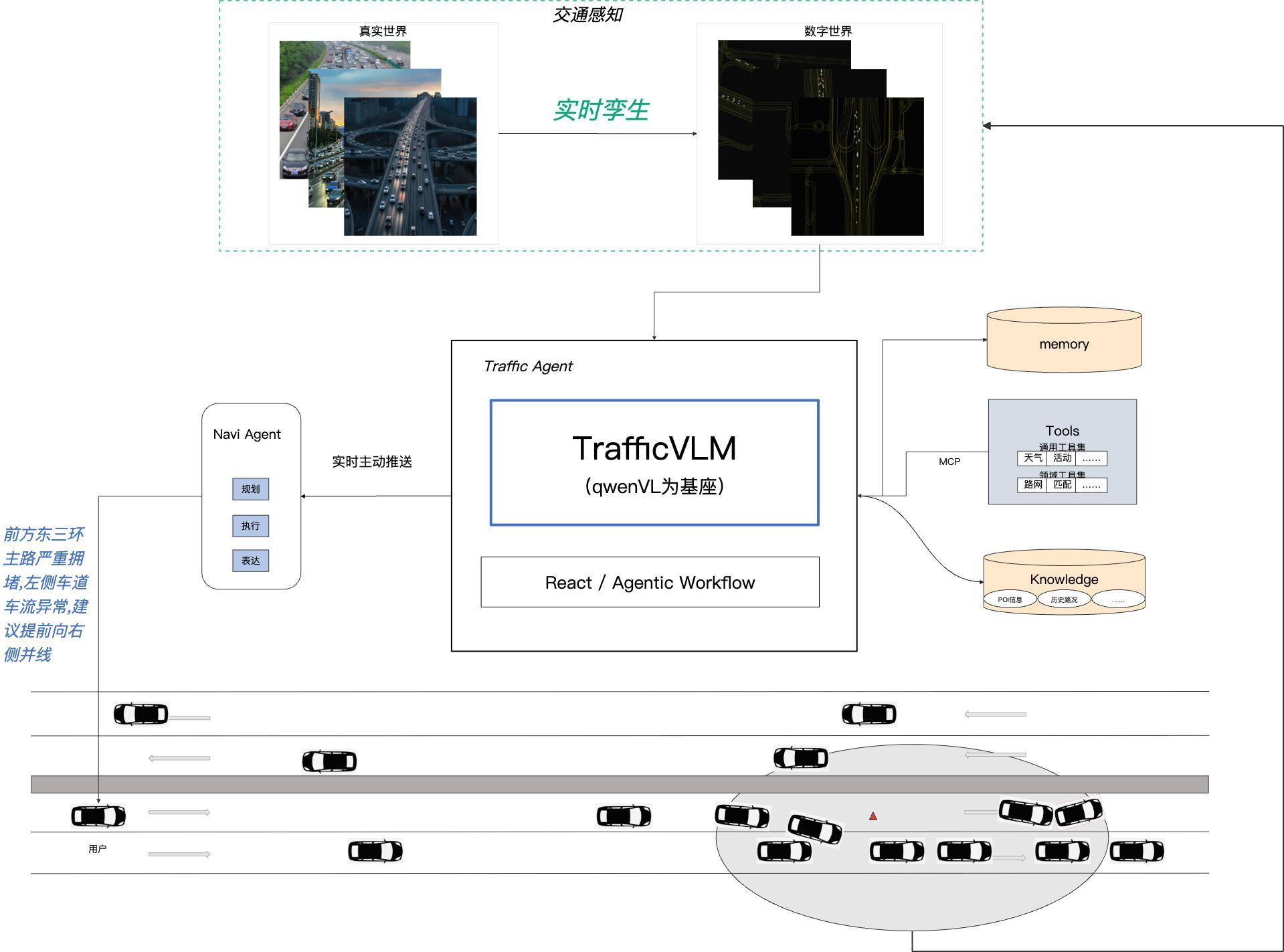
TrafficVLM基于通义Qwen-VL构建,能够将实时交通数据转化为视频流进行解析,识别车辆变道意图、拥堵传导趋势等复杂场景。据官方介绍,该系统可提前识别前方3公里处的突发事故,并通过分钟级更新的云端推理,向用户推送车道级避让建议。用户可通过导航界面查看实时路况可视化画面。

此次升级标志着高德在空间智能领域的进一步探索,通过AI技术将全局交通洞察转化为具体出行决策支持,目前该能力已集成至高德地图导航系统中。



